BLOG ブログ
前回の記事(Piomatix LBSのAPIを使ってルート探索を実装してみた)ではPiomatix LBS APIとGoogleMapを使ってルート探索のデモアプリをご紹介しました。
今回からはこのAPIが提供している他の機能についてもご紹介していきます。
今回使用したAPIについて
車両情報と出発地点に基づいて、充電(ガソリン車の場合は給油)をせずに移動できるエリアを「到達可能範囲API」を用いて地図上(GoogleMap)に描画してみました。
○到達可能範囲APIについて
起点となる出発地から車による移動可能範囲を示す情報を返却してくれるAPIです。
「ルート探索API」と同様、移動に用いる車両情報を細かく指定できますので、その車のスペックや状態に応じて地図上に運行可能範囲を示すことができます。
デモアプリについて
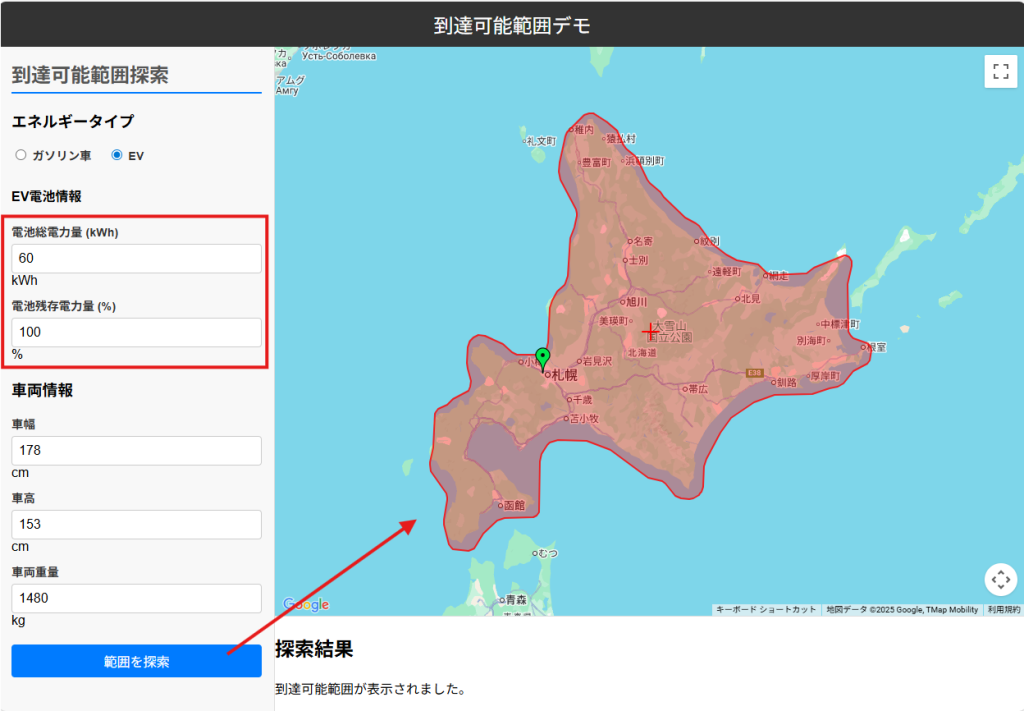
今回は現在地の位置情報を取得し、特定のEV車を利用するシナリオで、どの程度の電池残量でどこまで運行できるか地図(GoogleMap)に描画しました。
①現在地(北海道札幌市内)から電池総電力量60kWhでフル充電(100%)の場合
北海道全域の運行が可能である結果となりました。
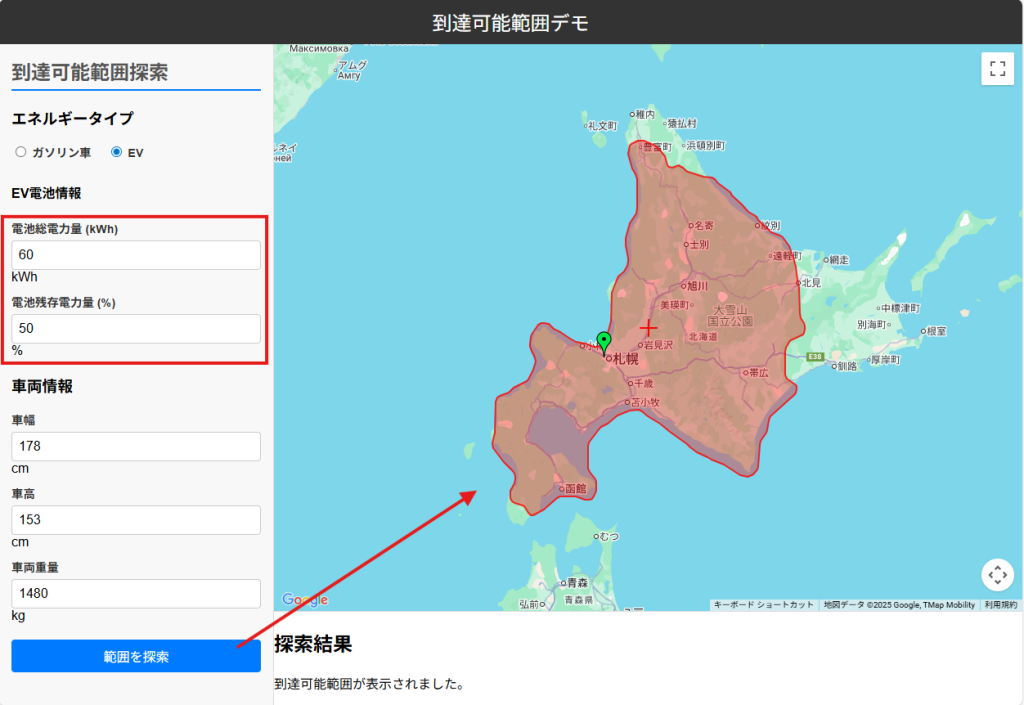
②現在地(北海道札幌市内)から電池総電力量60kWhで残電力量が半分(50%)の場合
北海道の北部と東部の一部を除く範囲で運行が可能である結果となりました。
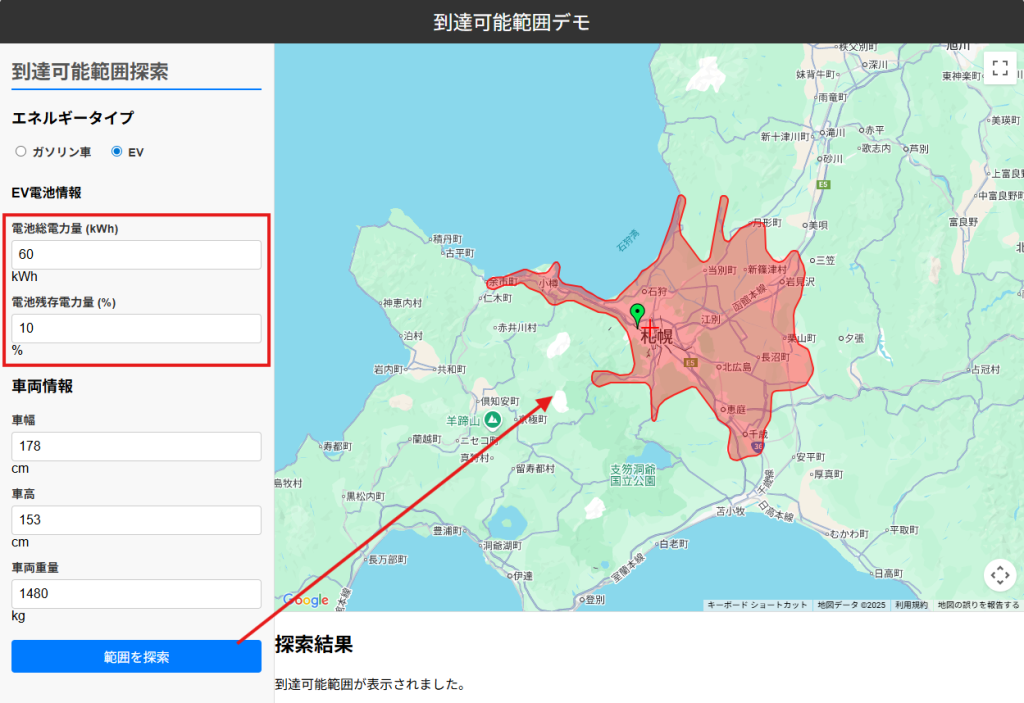
③現在地(北海道札幌市内)から電池総電力量60kWhで残電力量が残り僅か(10%)の場合
北海道札幌市近郊までの範囲で運行可能である結果となりました。
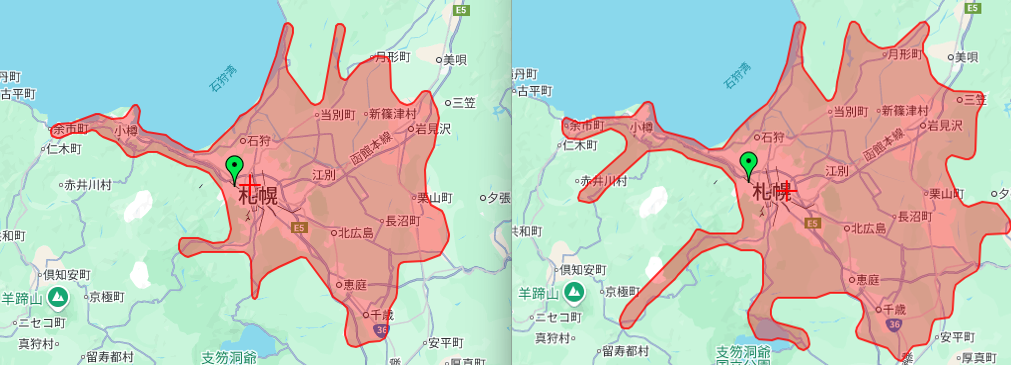
ちなみに…③と同条件で車両情報(車重)の設定を軽くした場合
左図は車両重量が1480kgの運行可能範囲、右図は車両重量が1000kgの運行可能範囲です。
車両重量が軽量であれば電費が良くなり、運行可能範囲が広がることがわかります。
まとめ
今回のデモについてはルート検索機能と同様に、主要な地図サービスにも存在する機能ですが、車両情報を指定することにより、より高精度の運行可能範囲を確認できることが示されました。
また、同APIにて提供されている充電スポット検索APIと連携することで、どこで充電が必要になりそうか事前にシミュレーションすることができます。
将来的にEV導入が幅広くモビリティサービス分野のビジネスにおけるDXを推進するツールとして活用できると思います。




